Research
The research is ongoing work. Some preliminary work can be found in the paper Optimization-based autonomous racing of 1:43 scale RC cars. In this paper, we present two control approaches for autonomous racing of RC race cars, which are based on mathematical optimization. Using a dynamical model of the vehicle, control inputs are computed by receding horizon based controllers, where the objective is to maximize progress on the track subject to the requirement of staying on the track and avoiding opponents. Both controllers can plan their own path online, only based on their position and the layout of the track. This allows a straightforward implementation of obstacle avoidance, by adapting the feasible set.
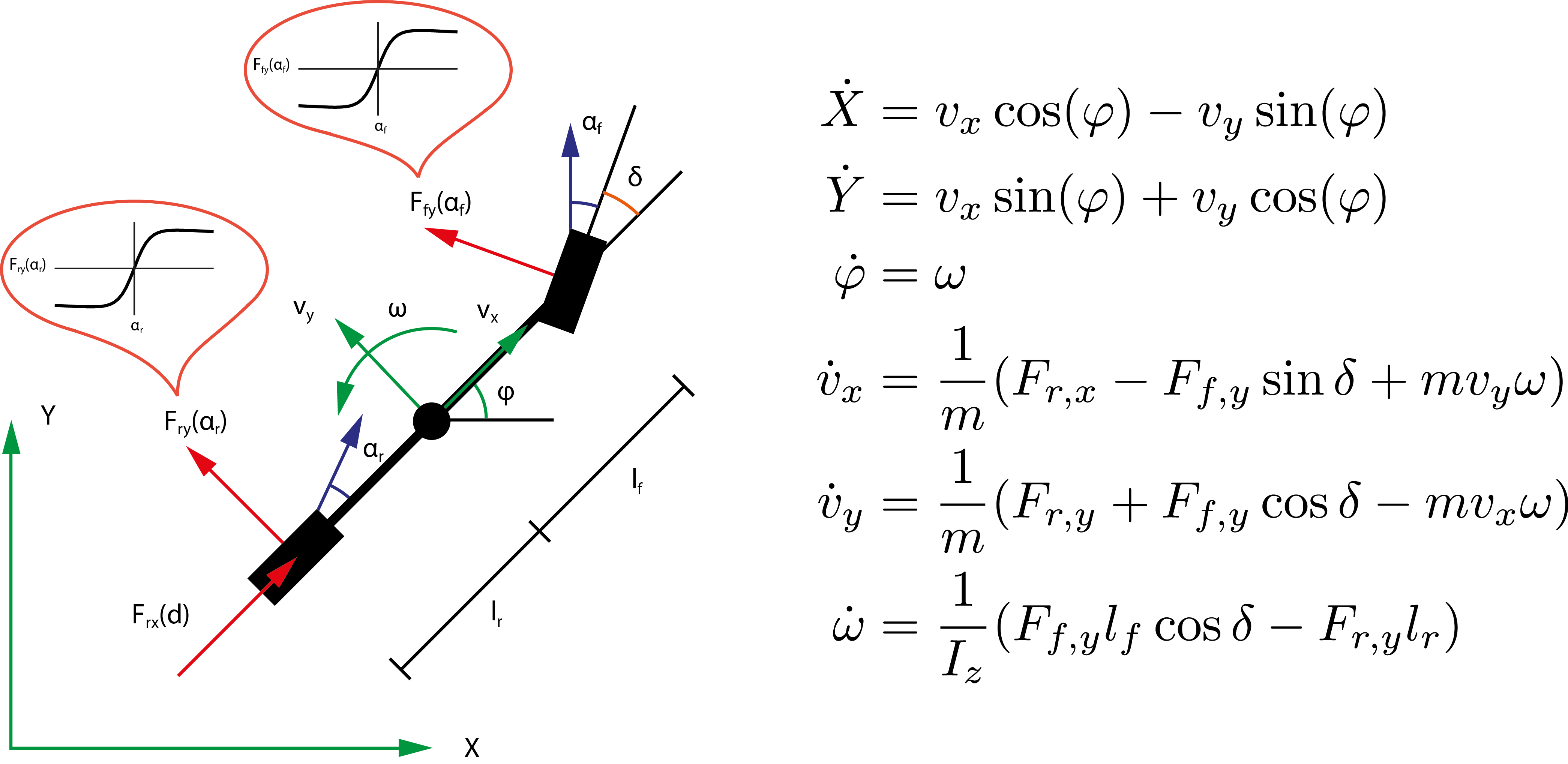
The model used for both controllers is a bicycle model with nonlinear tire forces, modeled using Pacejka Magic Formula.
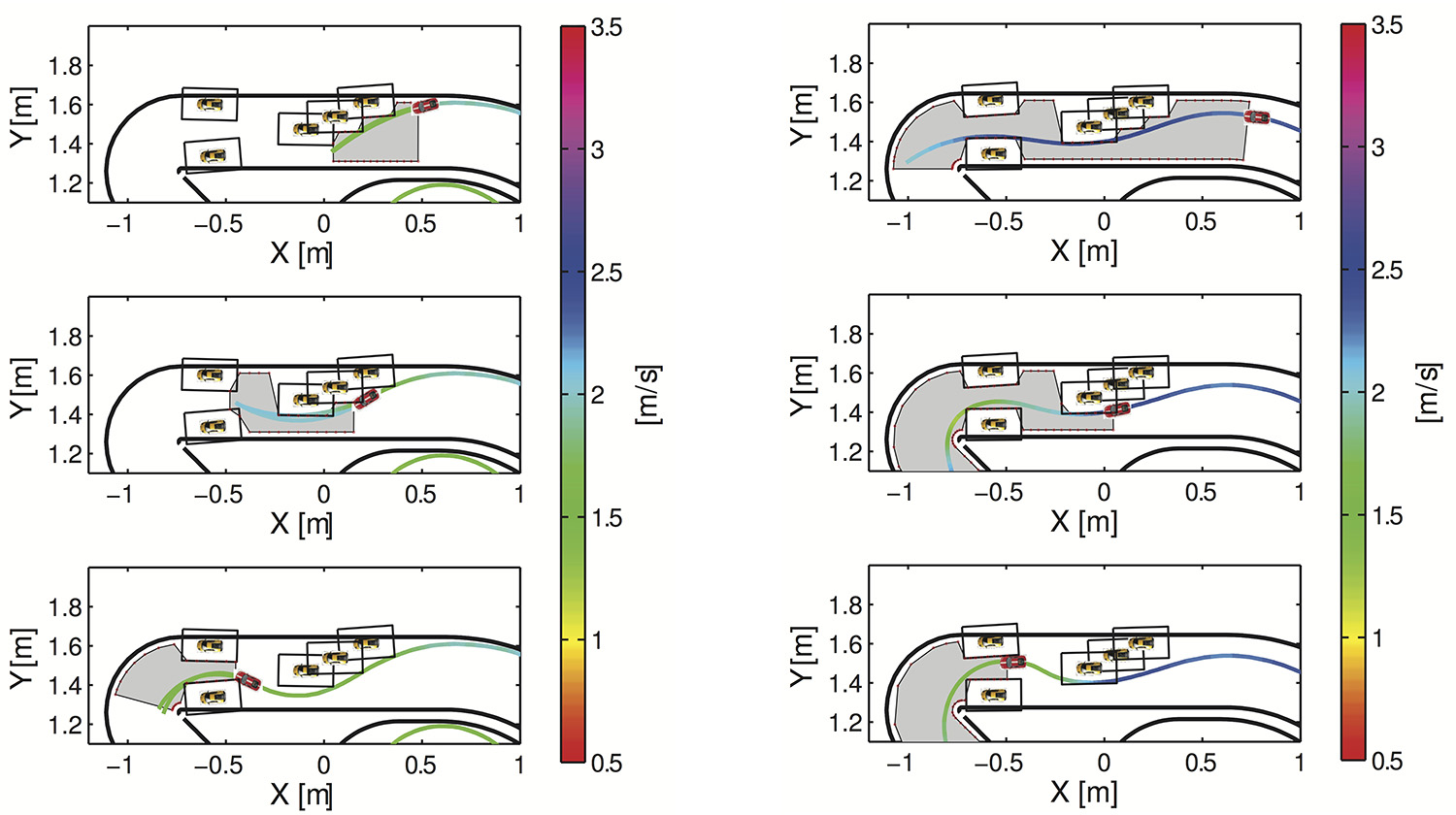
The obstacle avoidance, including the adapted feasible set is visualized in the next figure. On the left the 'Hierarchical Receding Horizon Controller' (HRHC) is shown. on the right the 'Model Predictive Contouring Controller' (MPPC).The figure uses experimental data: