Autonomous sailing
Modeling, Control and Simulation of Autonomous Sailing Boats
The project consists in the first mathematical study of the system dynamics, in presence of specific wind and sea conditions.
Outcomes:
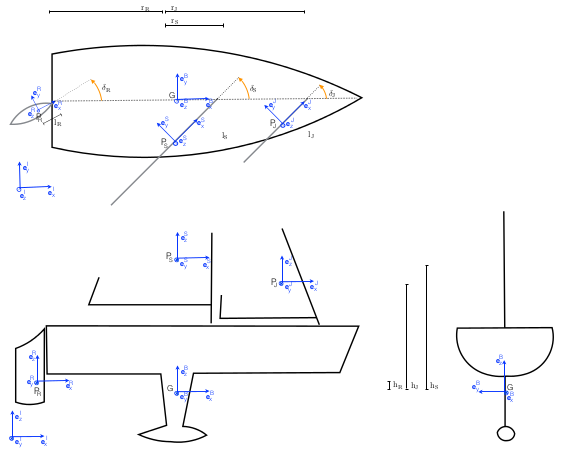
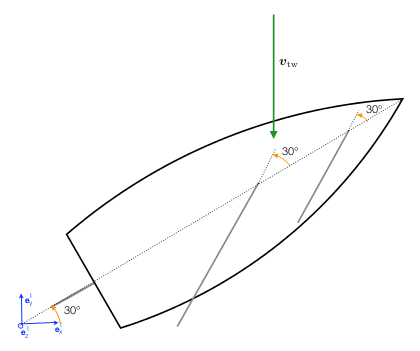
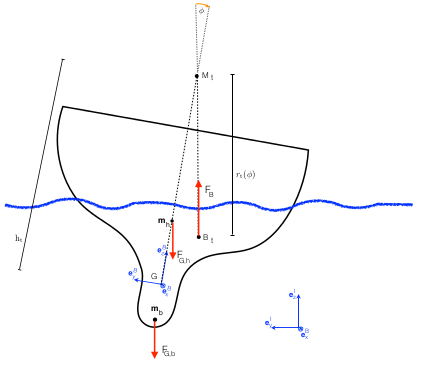
- Non-linear dynamical model of sailing boats. The model captures key features, such as the no-sail zone, the dependency on the apparent wind, the optimal heading angles to maximize upwind and downwind speeds. The model is rich enough to capture the relevant dynamical effects, yet simple enough to be exploited for control design purposes.
- Model-based non-linear control strategies for heading tracking.
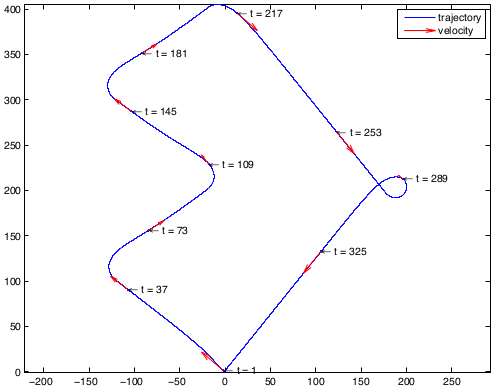
- Numerical simulations to test and validate the controlled system dynamics.
Hardware Setup for an Autonomous Sailing Boat
The project consists in the design of the hardware architecture necessary for switching between radio-controlled and autonomous mode.
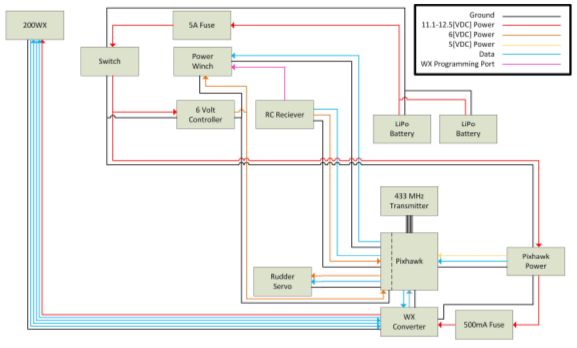
Outcomes:
- Hardware switch between radio-controlled and autonomous mode.
- Communication interfaces between the sensors, micro controller and actuators.
- Lake testing on the sailing boat.
Links
Testing Partner
external page Ganz Yachting
Autonomous Sailing Competitions
external page International Robotic Sailing Regatta