Applications
Traction Control

Traction control systems are amongst the best studied mechatronic systems in automotive applications. They are used to improve a driver's ability to control a vehicle under adverse external conditions such as wet or icy roads.
The traction controller aims at maximizing the traction force between the vehicle's tire and the road, thus preventing the wheel from slipping and at the same time improving vehicle stability and steerability.
The traction force function exhibits a strongly nonlinear and uncertain behavior; we therefore applied hybrid modeling techniques to the problem. A controller was devised to optimally control the slip. The explicit solution to the optimal control problem was computed and verified in simulation and real experiments. Compared to other methods (sliding mode, fuzzy), this method does not need ad-hoc tuning at all, its only tuning parameter is the prediction horizon.
F. Borrelli, A. Bemporad, M. Fodor, and D. Hrovat, "A Hybrid Approach to Traction Control". In IEEE Transactions on Control Systems Technology, vol. 14, no. 3, pp. 541-552, May 2006.
Adaptive Cruise Control
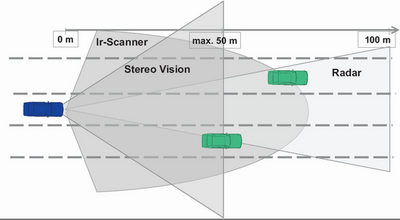
Cruise control is a common and well known automotive driver assistance system. The driver sets a reference speed and the engine is controlled so that this reference speed is maintained regardless of external loads such as wind, road slope or changing vehicle parameters. Further development led to the so called Adaptive Cruise Control (ACC) that takes into account the traffic in front of the car by using a multitude of sensory information.
Good acceleration and deceleration control is essential for the ACC systems. It was our aim to develop a controller which can cope with complex traffic scenes, computing the optimal acceleration and deceleration commands. Safety constraints are also to be considered.
We developed a hybrid model of the car to accurately capture the inherent hybridness of the system. A quadratic cost function was used and the constrained finite horizon optimal control (CFTOC) problem was posed. The explicit controller was computed by applying dynamic programming techniques. Experimental results were presented for the car-following scenario.
R. Möbus, M. Baotic, and M. Morari, "Multi-Object Adaptive Cruise Control". In Hybrid Systems: Computation and Control, vol. 2623, pp. 359-374, Lecture Notes in Computer Science, April 2003.
Electronic throttle

The electronic throttle has gradually become an essential element of many engine control systems. Compared to its mechanical counterpart, the electronic throttle leads to significant improvements in vehicle emission, fuel economy and drivability, if it is well controlled. Unfortunately, it exhibits a strong nonlinear behavior due to its being built of cheap components inducing a high friction. Additional obstacles are the so-called Limp Home position nonlinearity and the fast sampling needed for good control.
In spite of these difficulties, a good tracking controller is vital for the system in terms of responsiveness to driver's inputs. The goal was thus to create a controller which handles the nonlinearities and can be implemented efficiently.
A hybrid PWA model was developed, incorporating the nonlinearities. The optimal state feedback control law was computed explicitly, allowing for a very fast controller implementation. The controller was verified in simulation and experiment, yielding very satisfying results. The strength of this approach lies in the nonlinearities being included in the model directly. No ad-hoc tuning is necessary, as opposed to other controllers used for this task.
M. Baotic, M. Vasak, N. Peric, and M. Morari, "Hybrid System Theory Based Optimal Control of an Electronic Throttle". In Proceedings of the American Control Conference, pp. 5209-5214, Denver, CO, USA, June 2003.
Smart Damping Materials
Smart materials have long been heralded as the dawn of a new era in the construction of automotive vehicles, airplanes and other structures that have to meet ever more demanding performance requirements. This has largely not happened, at least not in the commercial arena. In this context dynamic behavior is one main design criterion for many kinds of load-carrying structures, as undesirable large-amplitude vibrations often impede the effective operation of various types of mechanical systems, including antennae, spacecrafts, rotorcrafts, automobiles, and sophisticated instruments. It is therefore desirable to introduce structural damping into a system to achieve a more satisfactory response and to delay fatigue damages.
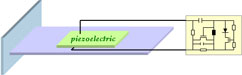
The large instrumentation overhead of conventional vibration control can be significantly reduced by a new method that involves attaching an electrical shunt controller across the terminals of one piezoelectric transducer with the view to minimizing structural vibrations. This approach is referred to as piezoelectric shunt damping and is known as a simple, low-cost, lightweight and easy-to-implement method for vibration damping.

We are developing new adaptive resonant shunt circuits that can efficiently damp several structural modes and do not require power for operation.
D. Niederberger, "Smart Damping Materials using Shunt Control". PhD Dissertation, ETH Zürich, Switzerland, 2005.
Autonomous Switching Shunts
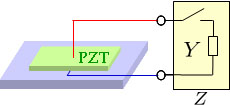
A completely autonomous shunt circuit was developed and implemented. It does not require any power for operation and its size is tiny. Experiments showed a vibration suppression of around 60%-70%.
The described shunt circuit is based on so called Switching Shunts. An optimal switching law was derived using hybrid system models. The obtained switching law was implemented with a few analog electronic components, such that the resulting circuit does not require power for operation. Additionally, the circuit can tune itself automatically.
D. Niederberger, "Design of Optimal Autonomous Switching Circuits to Suppress Mechanical Vibration". In Hybrid Systems: Computation and Control, vol. 3141, pp. 511-525, Lecture Notes in Computer Science, Springer, March 2005.
D. Niederberger, M. Morari, and S. Pietrzko, "A New Control Approach for Switching Shunt Damping". In Proceedings of the SPIE's Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, March 2004.
Modeling and Optimal Control of a Hydropower Plant
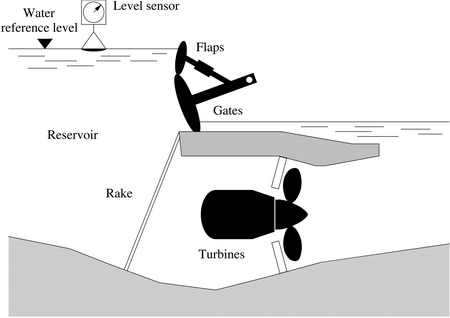
We consider a hydro power plant that includes three types of water outflow units: Four gates, four flaps and two turbines. The total outflow of the dammed river is determined both by the water level in the reservoir and by the opening of the units. The manipulated variables are the openings of each outflow element and the measured variables are the total outflow and the power generated.
In this work the outflow units are modeled as hybrid systems in the Mixed Logic Dynamical (MLD) form. For systems in MLD form the control synthesis problem can be formulated and solved in a systematic way using a Model Predictive Control (MPC) scheme. However, no control objective and controller were derived for this system so far.
The MLD model was capable of accurately reproducing the water level control behavior of the power plant. The detailed models of each unit considered not only standard operating conditions, but also emergencies and startup and shut-down procedures.
external page G. Ferrari-Trecate, D. Mignone, D. Castagnoli, and M. Morari, "Mixed Logic Dynamical Model of a Hydroelectric Power Plant". In Proceedings of the International Conference Automation of Mixed Processes Hybrid Dynamic Systems, Dortmund, Germany
Water Level Control for Cascaded River Power Plants
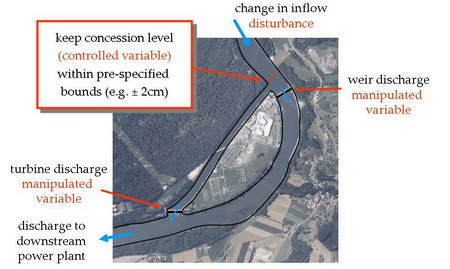
The discharge through a cascade of river power plants needs to be adjusted to control the water level at a pre-specified point. The common control method often yields large unnatural discharge variations resulting in unsatisfactory control performance. In cascades of river power plants, these discharge variations are unpredictably amplified affecting nature and imposing problems on navigation.
A supervisory controller for cascaded river power plants was conceived. The controller is based on Model Predictive Control (MPC). The required linear discrete time model of the power plant cascade is derived from the Saint Venant equations. The objective of the controller is to keep the pre-specified water levels within given bounds and to dampen the discharge variations. This is expressed in a quadratic cost function subject to constraints. A Kalman filter is used to estimate the current values of the state variables from available water level measurements.
The proposed scheme results in a coordinated control of the power plant cascade. It takes interactions between the power plants into account, issues preemptive control moves for anticipated disturbances, and includes explicit constraint handling and straightforward tuning. Compared with the currently employed PI-type controllers enhancements are achieved. In particular, the damping of disturbances is significantly improved while the water level constraints are met.
G. Glanzmann, M. von Siebenthal, T. Geyer, G. Papafotiou, and M. Morari, "Supervisory Water Level Control for Cascaded River Power Plants". In Proceedings of the International Conference on Hydropower, Stavanger, Norway, May 2005.